Dedicated to helping businesses and individuals prioritize safety, health, and compliance in the workplace. From small startups to large corporations, safety is essential, and we're here to make it easier.
Editor’s Note: This article was written by Amir Sharif, founder and COO of 3Laws. He is a member of Robotics 24/7’s Executive Advisory Board.
Robotics 24/7 is another publication of Peerless Media. Read the full article here
![]()
Robotic safety standards were forged in an era dominated by fixed industrial arms, hard fences and worst-case assumptions. The robotics landscape has changed dramatically.
Robots learn new skills through foundational AI models, mobile platforms navigate dynamic environments and legged robots walk among us. Yet the safety frameworks that govern robotic deployment have not kept pace.
It is time for a fundamental rethink of robotic safety.
At their core, today’s cornerstone standards, namely ISO 10218-1:2025 and ISO 10218-2:2025, focus on industrial robots and their integration into structured industrial applications, explicitly including robot cells as a primary organizing concept. Supplementary guidance, such as ISO/TS 15066:2016, addresses collaborative industrial robots, but it still assumes comparatively bounded operating modes and environments.

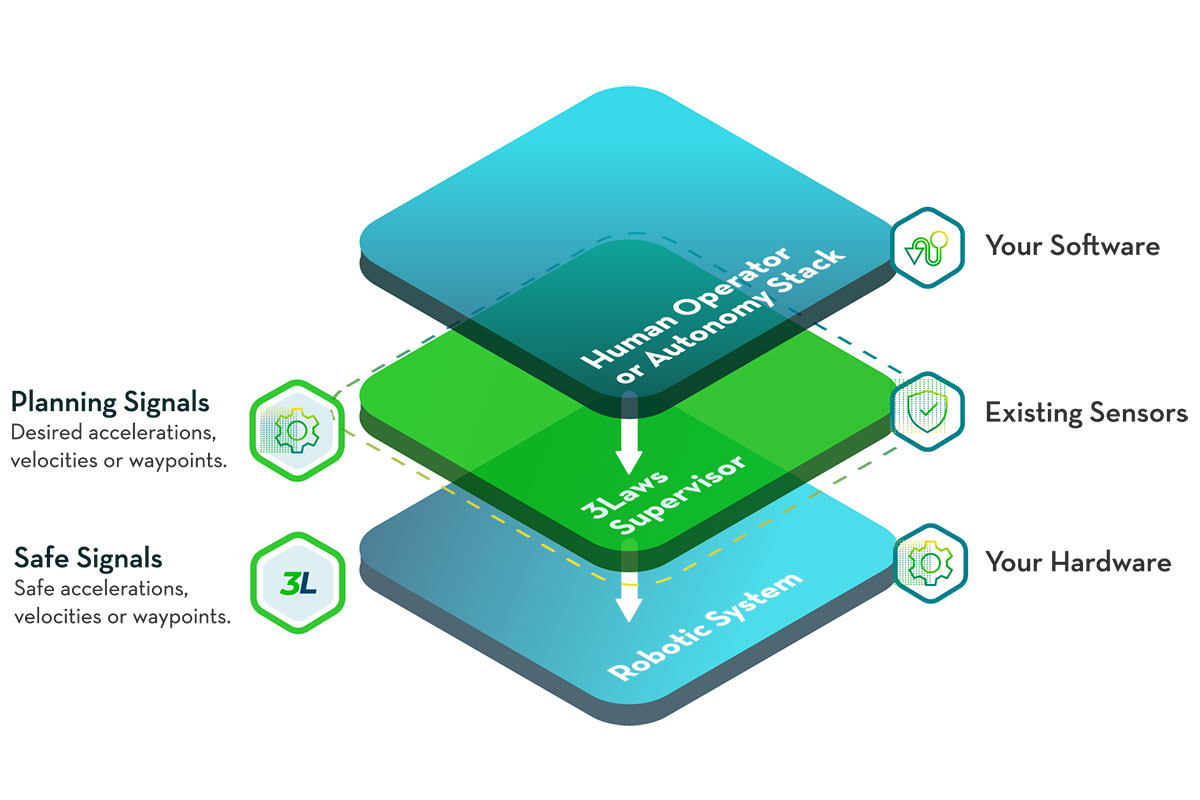
This “cell” model reveals a deeper mismatch: programmable devices (robots) need “programmable infrastructure” (cages). Historically, we made infrastructure physical via fixed fences and static guarding, while the robot inside remained reprogrammable. That worked when robots were predictable and stationary. But in a world of dynamic autonomy and continuous re-tasking, fixed cages become the bottleneck. The only scalable alternative is a virtual, programmable cage, or a safety envelope that updates in software in real time. And that is only achievable with dynamic safety.
So where are the gaps?

Join our Safety Matters newsletter and get safety news across logistics, warehousing, manufacturing, construction, and other high-risk environments. Get the latest regulatory updates, alerts, safety products, equipment and training, and analysis.
Don't miss a single news story, product review or safety resource. Subscribe to our newsletter for the latest safety news, updates, and exclusive offers.